
团队设计的是一种单光子飞行时间镭射雷达(LiDAR)系统。该系统发射镭射脉冲,这些脉冲与物体碰撞后反射回设备。镭射雷达通过测量每个脉冲往返所需的时间,就能确定物体的形状。该系统能够获取距离达1公里远处的物体或场景的高解析度三维图像,即使在环境恶劣或物体被树叶、伪装网遮挡的情况下,也能实现精细成像,大大提高了安全监控和遥感能力。
为了达到提高解析度,团队仔细校准调整不同的组件,如设备内部用于引导镭射脉冲的微小部件。为了让设备能够区分单个光子,团队使用了一种基于极细超导线的光检测感测器,而这种组件在镭射雷达中并不常见。此外,还需要过滤掉可能进入探测器并降低图像质量的阳光。
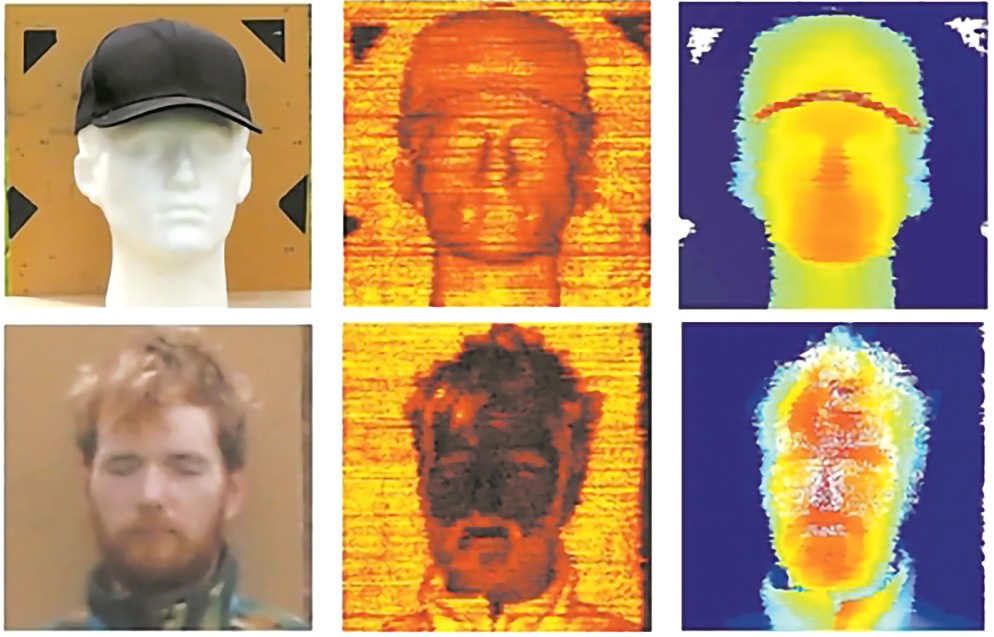
测试表明,该系统分别在45米和325米日光条件下,拍摄了一名团队成员的人脸三维图像,分辨出了其面部小至1毫米的特征,深度解析度比他们之前的纪录提高了大约10倍。而在更小尺度上,他们从32米外拍摄了乐高小人偶的图像。在另一项测试中,他们对1公里外的一段通信塔进行了拍摄。
该系统出色的深度解析度意味着,它特别适合对杂乱背景后的物体成像,这对于数码相机来说是一个难题。团队表示,创建周围环境的详细三维地图,对于自动驾驶汽车甚至一些机器人来说也至关重要◆
























